


























Introduction:
Autonomous driving technology, or self-driving cars, promises to revolutionize the transportation industry. With the potential to reduce accidents, improve traffic flow, and offer greater mobility, it’s easy to see why tech companies, automotive manufacturers, and governments have invested heavily in its development. However, despite the excitement surrounding autonomous vehicles (AVs), real-world road tests have revealed numerous challenges that must be addressed before self-driving cars can be deployed at scale.
This article explores some of the key hurdles that autonomous driving technology faces in real-world testing, covering both technological and societal obstacles. Understanding these challenges is crucial to making autonomous driving a safe and reliable mode of transportation in the future.
1. Complex and Unpredictable Road Environments
One of the primary challenges faced by autonomous vehicles during road tests is the complexity and unpredictability of real-world driving environments. Unlike controlled testing environments or simulators, roads are dynamic spaces with constant variables, including traffic patterns, weather conditions, road construction, and human drivers, all of which can make autonomous driving a difficult task.
1.1. Dynamic Traffic and Unpredictable Human Behavior
Human drivers are often unpredictable, making the task of programming an autonomous vehicle to respond to the wide variety of potential behaviors challenging. Drivers might run red lights, change lanes erratically, or engage in risky behaviors like speeding or tailgating. Autonomous vehicles must be able to anticipate and react to these human behaviors safely and in real-time, which is a monumental task for the underlying algorithms.
For example, during a road test, an autonomous car might encounter a driver who suddenly cuts in front of it or swerves to avoid an obstacle. The self-driving car’s sensors and AI systems must not only detect these actions but also react instantly in a manner that ensures safety for all road users. Ensuring that autonomous vehicles can handle these unexpected situations is a major challenge for developers.
1.2. Navigating Complex Intersections and Merging Traffic
Intersections, especially in urban settings, are full of challenges for autonomous vehicles. AVs must deal with dynamic traffic signals, pedestrians, cyclists, and turning vehicles. Merging onto highways or navigating multilane roads is similarly difficult. These scenarios require AVs to make split-second decisions, balancing multiple data streams from their sensors, cameras, and onboard AI.
For example, if an autonomous vehicle needs to merge onto a busy highway, it must correctly estimate the speed of other vehicles and find a gap to merge into. Misjudging these conditions could lead to accidents. Road tests have demonstrated that current technology sometimes struggles with these complex maneuvers, especially when merging in high-traffic environments or navigating intersections with numerous turning vehicles.
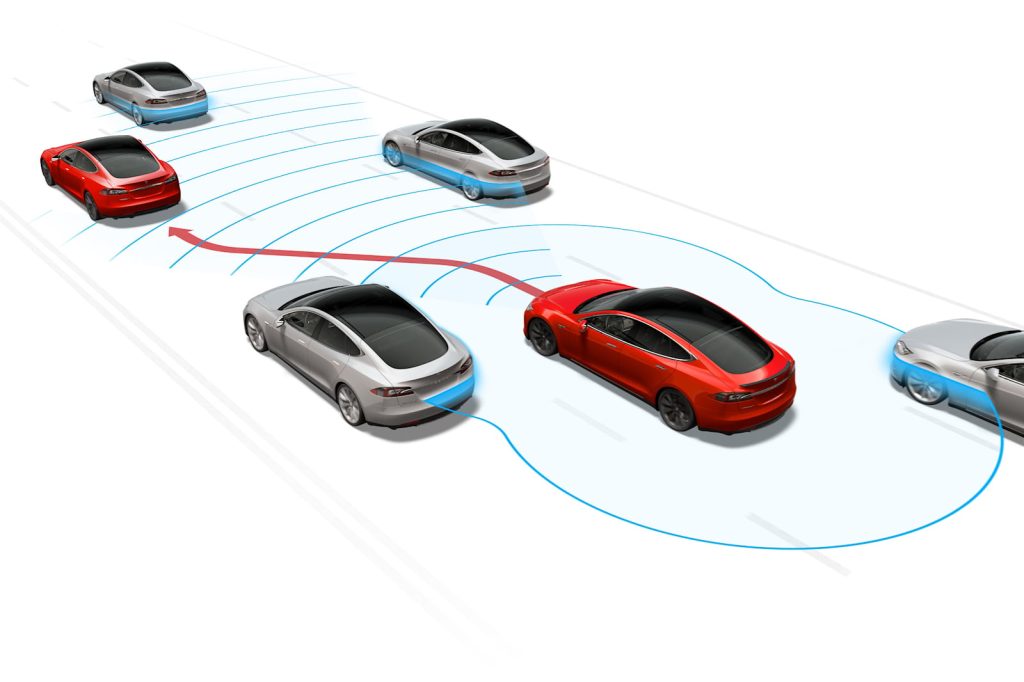
2. Sensor Limitations and Perception Challenges
Autonomous vehicles rely heavily on a combination of sensors—including LiDAR, radar, and cameras—to understand their surroundings. However, real-world conditions often limit the effectiveness of these sensors, especially when faced with adverse weather, poor visibility, or unusual road conditions.
2.1. Weather and Environmental Challenges
One of the significant hurdles for autonomous vehicles is their ability to operate in diverse and often unpredictable weather conditions. Snow, rain, fog, and ice can obstruct sensors and cameras, reducing their effectiveness in gathering accurate data. For example, snow can cover lane markings, making it difficult for the car to understand where it should go, while heavy rain might cause radar or LiDAR systems to lose track of nearby vehicles or obstacles.
Road tests have shown that self-driving cars sometimes struggle to maintain safe speeds or proper lane positioning in adverse weather. For instance, a rainstorm might cause the vehicle’s sensors to misinterpret the environment, resulting in erratic behavior or reduced decision-making ability. In these conditions, the vehicles’ reliance on external sensors becomes a double-edged sword.
2.2. Sensor Fusion and Data Processing
While autonomous vehicles are equipped with multiple sensors to collect data from their environment, the real challenge lies in sensor fusion—combining the data from these sensors in a way that creates a coherent understanding of the surroundings. Each sensor has its own strengths and weaknesses, and the vehicle must effectively process the information from all sources to make accurate decisions.
For example, LiDAR sensors are excellent at mapping the environment in 3D, but they might struggle in detecting certain objects, like debris on the road or low-contrast obstacles. Cameras can detect objects and road signs well, but they can be confused by glare, shadows, or weather conditions. Radar can detect the speed and distance of objects, but lacks the resolution to provide detailed information. Combining this data in real-time is still a significant technical challenge.
3. Ethical and Legal Considerations
As autonomous vehicles are tested in real-world conditions, there are critical ethical and legal questions that need to be addressed. These concerns cover a wide range of topics, from how the car should behave in emergency situations to questions about liability in case of an accident.
3.1. Decision-Making in Ethical Dilemmas
One of the most discussed ethical challenges is how an autonomous vehicle should behave in an emergency situation. For example, if a crash is unavoidable, should the car prioritize the safety of its passengers, pedestrians, or other road users? This is often referred to as the “trolley problem” of autonomous vehicles, where the car must make life-and-death decisions.
During real-world testing, developers must ensure that the vehicle’s decision-making processes align with societal values and moral guidelines. However, programming these decisions is not straightforward, and opinions on what should be prioritized can vary greatly among individuals and cultures. Thus, the question of how to balance ethical decisions in real-world driving scenarios remains a major concern.
3.2. Legal and Regulatory Challenges
The legal landscape surrounding autonomous vehicles is also complex and still evolving. In many places, regulations governing self-driving cars are either in draft stages or are entirely absent. This creates uncertainty for companies conducting road tests, as they are unsure whether their vehicles are in compliance with existing traffic laws.
For instance, when a self-driving car is involved in an accident, determining liability can be tricky. Is it the responsibility of the manufacturer, the software developer, the owner, or the vehicle itself? As autonomous vehicles become more prevalent, regulators and lawmakers will need to create clear legal frameworks to handle these issues, ensuring that AV technology doesn’t outpace the legal protections needed to safeguard consumers and society at large.
4. Public Perception and Trust Issues
For autonomous vehicles to become widely adopted, public perception and trust play a significant role. Many people are still wary of the idea of giving up control of their vehicles to an AI system, especially after highly publicized incidents involving AVs during road tests.
4.1. Safety Concerns and Trust Building
One of the key concerns for the public is safety. Autonomous vehicles have been involved in accidents during road testing, some of which have resulted in fatalities. These incidents have led to questions about the reliability and safety of self-driving technology. Building public trust will require a track record of safe and effective performance, which can only be established through rigorous testing and transparent reporting of road test results.
4.2. Human Interaction with Autonomous Systems
Another challenge is human interaction with autonomous systems. Even though AVs are designed to drive themselves, most systems still require human intervention in certain situations, especially in complex or novel scenarios. This leads to uncertainty about when and how drivers should take control of the vehicle, potentially causing confusion or a lack of confidence in the system. Ensuring that human drivers and passengers feel comfortable and understand how to interact with the vehicle is a key element of building public trust.
5. Infrastructure Limitations
Autonomous vehicles rely on advanced mapping systems and digital infrastructure to navigate roads. However, not all areas have the infrastructure in place to support self-driving cars, which could limit the success of road tests and full deployment.
5.1. Outdated or Inadequate Infrastructure
Many cities and rural areas still have outdated road infrastructure, with poorly marked lanes, inconsistent traffic signals, and incomplete maps. Autonomous vehicles rely heavily on high-definition maps to navigate, and in areas where these maps are incomplete or inaccurate, the cars may struggle to find their way.
Moreover, the technology behind autonomous vehicles assumes that roadways are in good condition and free from irregularities. But potholes, debris, and poorly designed intersections can cause the vehicle to misinterpret its environment, resulting in operational errors.
5.2. Lack of Vehicle-to-Infrastructure (V2X) Communication
Another challenge is the lack of widespread vehicle-to-infrastructure (V2X) communication. V2X technology allows vehicles to communicate with traffic signals, road signs, and other vehicles, improving safety and traffic flow. However, this technology is not yet ubiquitous, meaning that autonomous vehicles may not always be able to interact effectively with other elements of the transportation infrastructure.
Conclusion: Navigating the Road to Full Autonomy
While autonomous driving technology holds immense promise, real-world road tests have exposed several challenges that need to be overcome. These challenges range from dealing with unpredictable human drivers and environmental conditions to addressing ethical concerns and regulatory issues. Moreover, the limitations of sensors, infrastructure, and public trust continue to pose significant hurdles.
Despite these challenges, significant progress has been made, and continued testing and development are essential to refining autonomous driving systems. As these obstacles are addressed, autonomous vehicles have the potential to transform transportation, making it safer, more efficient, and accessible to all. The road to fully autonomous vehicles may be long, but with each step, we move closer to a future where self-driving cars become an integral part of our everyday lives.












{kind=link}